Denne guide tager udgangspunkt i anvendelse af lego klodser og motorer fra LEGO Mindstorm NXT men både klodser og motorer fra LEGO Mindstorm EV3 kan også anvendes.
Formål
At bygge og programmere en robotder kan følge en linje på gulvet.
- Links til youtube-videoer fra industrien – sortering (f.eks.)
- Tøjtransport: https://www.youtube.com/watch?v=peOM_Nk4AEY
- Servering: https://www.youtube.com/watch?v=bczt68gDdRw&t=341s
- Lagerstyring (magnetisk): https://www.youtube.com/watch?v=bvEzDNxj7hA
Undersøgelse
- Hvordan virker den lyssensor der anvendes (IR sensor)
- Hvilke andre metoder kunne der være til at køre efter en linje (linjen behøver ikke være synlig for mennesker)
- Hvilke fordele/ulemper er der ved de forskellige teknologier
- Hvordan får man robotten til at køre
- Motor
- Servo
- DC-motor
- Stepper Motor
- Hvad er fordele og ulemper ved at bruge disse? – gerne holdt op mod hinanden.
- Motor
- Hvor hurtigt skal maskinen køre?
- Hvor præcis skal den være?
- Hvordan er sammenhæng mellem hastighed og robottens evne til at blive på linjen.
Tidsforbrug
Hvis man kun følger instruktionerne som en tutorial: 4-6 timer
Hvis man samtidig underviser i de delkomponenter, der udgør det samlede projekt: 2-3 dage á 6 timer.
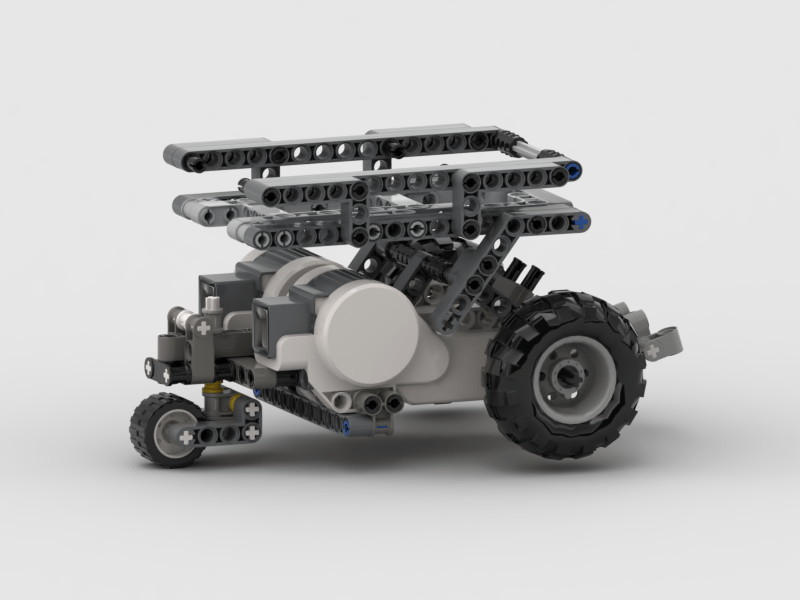
Robot
Som hjælp til at bygge til at bygge robotten, kan følgende byggevejledning med fordel anvendes til inspiration: Tribot-NXT-Arduino
Det er ikke vigtigt at robotten bygges præcis som disse og fri fantasi kan anbefales hvis tiden er til det. Dog anbefales det at bygge et trehjulet (Tribot) robot da robotten herved får nemmere ved at dreje samt at styringen hertil er nemmere.
Resourseliste
- 2x IR sensorer
- 2x LEGO NXT eller EV3 motorer
- 2x LEGT NXT eller EV3 kabler
- 1x Batteriboks til 6xAA batterier
- 1x Arduino UNO
- 1x Arduino Motor Shield
- 1x Arduino Prototype Shield
- 1x 9V Batteriklemme
- 1x USB Kabel (A-B)
- Diverse ledning (stiv)
- Pin header til montage på ledning
- Ringetryk
- Modstand 10K
Værktøj
- Skruetrækker til Arduino Motor Shield
- Skævbider
- Afisoleringstang
- Loddekolbe
